没啥用的小知识!
C++怎么在main之前print一个东西
在论坛上看到一个很搞的问题,正常程序执行都是从main函数开始,要在这之前执行print,哈哈哈。。。。只能想到构造器。
1 | class TT { |

做一个一直努力的人,青年向上走--cty
##白皮书
最近在阅读关于智能座舱的行业现状,看到这个,遂发出来共享给大家。
个人看来,座舱域更需要关注的信息不是娱乐以及覆盖手机的功能,更应该提供给用户行车更好的体验
例如HUD的布局,传统仪表盘会慢慢淘汰这是事实,做性能车的就搞”科技感加持性能“,做家用车就搞”舒适和实用“。
此外,座舱域也可以集成一些实用的功能,舱泊一体是个好方案,将AVM、AVP、APA功能集成进座舱域以后一定有市场。娱乐功能没那么重要,真开车肯定要认认真真开的!!!下班停到地库抽支烟的功夫,也是抱着手机的居多。
PS:移动端如果看不到这个PDF的话,只能换电脑来看了,QAQ。
这个白皮书写得很不错,值得一看。
白皮书
此段笔记记录在对鱼眼广角相机标定、拼接的过程中遇到的问题和解决思路,并辅以相关的基础知识备忘。
源代码可以下载如下两个压缩包,1用锁实现了同步、2只是简单拼接。两者方法思路基本都是一致的,都可以作为了解原理的起点:
点击下载代码 1
点击下载代码 2
标定板的制作参考如下:
Camera Calibration Pattern Generator – calib.io
https://calib.io/pages/camera-calibration-pattern-generator
可以使用这个小软件来制作标定板
先理清两个概念:
1、畸变系数
畸变系数,畸变主要分为径向畸变和切向畸变。
①径向畸变,沿着透镜半径方向分布的畸变;
产生原因:是由透镜质量引起的,光线在远离透镜中心的地方比靠近中心的地方更加弯曲。径向畸变主要包括桶形畸变和枕形畸变两种。
就好比把一个直线拉弯了,哈哈镜都玩过,一个原理
产生的原因是透镜形状和质量引起的,一般来说市场上的鱼眼相机是桶形畸变
②切向畸变,
切向畸变是由于透镜本身与相机传感器平面(像平面)或图像平面不平行而产生的。 切向畸变主要发生在相机传感器和镜头不平行的情况下;因为有夹角,所以光透过镜头传到图像传感器上时,成像位置发生了变化。
[k1, k2, p1, p2, k3]
如果是使用的opencv的接口做的标定的话,那么畸变向量的顺序是这个样子的
其中k指的是径向畸变radial distortion
p指的是切向畸变TangentialDistortion
参考广汽研究院发表的论文复现了其对应的算法并做了改进,由于在停车位识别方面,传统图像处理的算法效果并不好,真的要使用,还是要采用带有深度学习的方案
这一章由于其特殊性和数学推导的复杂,很难写得很细。我在此只叙述实现的一些方法和一些意见。具体的工程,在附件中有多份深度学习的源码,可以研究和使用。
传统的方案是采取直线检测来做的,在AVM图像里,用二值化之后利用霍夫变换来对直线进行检测,可能还会用到聚类算法等,最后来拟合构成车位。
但是这一大类利用传统图像处理的方法准确率都偏低,很容易漏检或者混检。
利用深度学习的方法,缺点是必须要使用带算力的SoC,价格一定是相对昂贵的,不管是GPU还是NPU,严重依赖硬件加速,即使对模型进行量化压缩,想要高效又准确也是个难题。
并且各家都在主推自己的工具链,想要在激烈的市场竞争中分得最大的这一块蛋糕,地平线有天工开物,黑芝麻有华山,TI有TIDL,英伟达有TensorRT和CUDA等等。
深度学习的效果,经过实际的验证,确实比传统图像算法优秀得多,以往的方法都是使用人手工精心设计的特征,来进行提取和处理,
比如说利用频谱特征、小波变换、SIFT、ORB、HOG等,但不是所有问题都可以用深度学习来解决!
深度学习本质上强大在非线性拟合能力,用一个三层的神经网络能拟合出任意的函数,但具体问题具体分析,它并没有那么“智能”。
目前已有的空闲车位识别技术可以分为基于超声波雷达探测,基于视觉的空闲车位识别以及超声波与视觉相融合3 种基本模式。
得益于360°环视成像技术的成熟发展,基于环视图像的全视觉空闲车位线识别方法较为成熟了。
在其他学者既已提出的众多研究车位线自动识别方法中,可划分为依据线检测与依据角点检测定位车位两种基本思路。
1 | 一个 Visual Studio Code 扩展,支持许多用于 C 和 C++ 代码的静态代码分析器。 |
在文件保存时或文件编辑后,代码编辑器中的即时 linting。
自动查找可用的静态分析工具。
以最少的开发工作量轻松支持其他静态分析器。
1 | Supported Static Analyzers |
要求您的机器上必须至少安装上述静态代码分析器之一。
扩展应该支持列出的静态代码分析器的任何版本;并将尝试在您的 PATH 环境变量中找到它们。
如果未自动找到工具,则必须手动指定适当的 c-cpp-flylint.*.executable 配置。
1 | Debian & Ubuntu Clang 可通过 apt-get 获得:# sudo apt-get install clang |
这篇论文的思路很巧妙,是同济大学在2019年做的一些工作,数据集使用的是ps2.0
我写的一些初步解析可以下载:解析
论文原文下载:原文
其实现在车位识别还是分成三个大方向
一是传统的超声波检测,这种方法使用的工况还是有局限性的,必须要在前后有障碍物的时候才行
二是采用视觉检测,这种方法也存在许多局限,比如说车位线不清晰的情况,还有没有车位线的情况。
视觉这里面还有很多种思路,比如说采用语义分割来对地面进行识别,还有比如说采用目标检测的方法,不管是YOLO还是RCNN系列或者SSD,检测车位入口的角点来构成车位。
感知模块:负责三类任务,运动状态估计、自身位置估计、外部环境态势观测。
从传感器采集信号开始,感知模块就已经在运作了,这个模块复杂程度最高,技术难度最大,各种不同的传感器采集的信号不同,组织形式不同,所以难度也很大。例如:核心的几个东西,
IMU:即惯性测量单元,确定当前速度、加速度、横摆角速度、前轮转角状态
定位:北斗、GPS,提供经纬度坐标值,RAC技术
视觉传感器:车身一般会配备多个摄像头,包括多个大角度鱼眼摄像头、前后向的远视距摄像头等。
激光雷达:提供车身周围一定范围的点云信号,可以理解为距离
毫米波雷达:如果要测得远,可测量的角度就会变小。毫米波雷达分为24Ghz和77Ghz频段。测距测速能力强。在雨雪天气时的鲁棒性很好,但是对高处物体和小物体检测效果有限。
超声波雷达:测量的距离更近了,因为频率更低,低频波束在传播中容易耗散
好,有这几个东西,基本上感知系统就有一些保障了
当然,单个传感器的原始数据很多很复杂,每一个的置信度都不是百分之百,所以要有组织形式,这个也属于感知模块要做的事情
例如,视觉传感器要和雷达传感器相互配合,锁定值得关注的目标,辨识目标的类别,追踪并预测其未来运动的趋势。此外还有V2X这样的方法来弥补不足。
写在最前面:
出于兴趣,我针对轻量化神经网络的训练和部署做了一些相关的研究,在此做一个学习过程记录
首先是数据集的制作,在以下网址可以找到我分享的关于AVM的一个数据集,label:
‘’‘’‘’‘(待上传)
第一步是从一堆相似性太高的数据集里面筛选出一些合适的样本,并移动至目标目录,更改好名字
参考以下的脚本
从计算机的眼睛里看,设备就是一组寄存器,比如说IO设备, 串口,键盘,磁盘,打印机,总线,中断控制器,DMA,GPU 这些设备就是挂在计算机下面的。那么,操作系统,如何使应用程序能访问这些设备?
我们知道,IO设备在计算机看来,或者说在处理器看来就是一组#寄存器和协议#。
本节内容主要解决两个问题:
1、什么是设备的驱动程序
2、Linux设备抽象
IO设备的主要功能:输入和输出能够读写字节序列,流或者数组常见的设备都满足这个模型
终端/串口–字节流char_device 打印机–字节流,例如postscript文件 硬盘–字节数组,按照块访问 GPU–字节流(控制)+字节数组(显示存储器)
1 | 所以: |
把设备的寄存器直接暴露给用户是很糟糕和危险的,这显而易见。 这样,也给应用层的软件带来了很大的负担,出错的代价也会很大的 所以,我们要对设备做抽象,要在操作系统和实体设备(寄存器和协议)之间做一个抽象的层
这个尽可能统一的方式,如同一层API,就是设备驱动程序 我们不用知道寄存器的编号是多少,不用知道写进去后怎么样才能操作完成 这一层,就叫做驱动。
所有的这些设备:I/O设备,最重要的功能就是:数据往应用里送往外出。 char——device
补充一下字节流byte_stream,比如说,键盘的按键,它输入的就是一系列的事件,按下的这一大串按键 就可以看作一个字节流
block——device一块一块的,字节块。 有意思的事情:我们的显卡,是什么设备? 显存不是按块访问的,显卡暨是字节流,又是一个字节数组
驱动
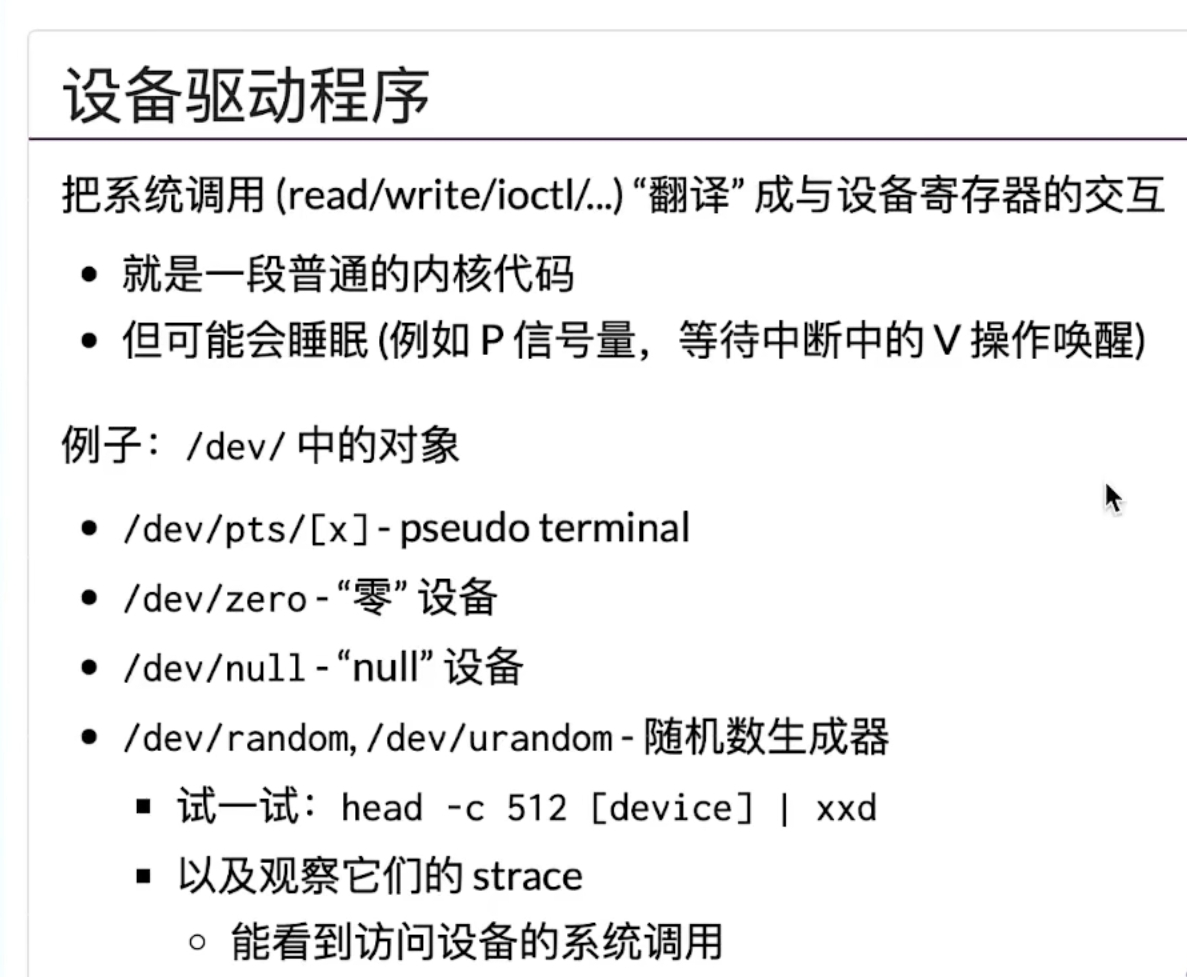
这一大坨设备的抽象,最重要的就是读写和控制,设备驱动程序就是为设备建立起这个模型的代码
需要一段代码,需要把例如read这一段系统调用,翻译成设备寄存器能听得懂的这一段话。
这一段代码,把系统调用翻译,注意是翻译,我们能看到的一大坨通用API,变成一堆五花八门的设备之间的翻译
其实shell也是类似的原理,
shell是把命令,翻译成一组系统调用,这些系统调用的序列,再通过驱动层,翻译成为了实际的寄存器操作,被执行了起来,就是一层层往下的这个过程
缺失模块。
1、请确保node版本大于6.2
2、在博客根目录(注意不是yilia根目录)执行以下命令:
npm i hexo-generator-json-content --save
3、在根目录_config.yml里添加配置:
jsonContent:
meta: false
pages: false
posts:
title: true
date: true
path: true
text: false
raw: false
content: false
slug: false
updated: false
comments: false
link: false
permalink: false
excerpt: false
categories: false
tags: true
{kind=link}